不朽情缘


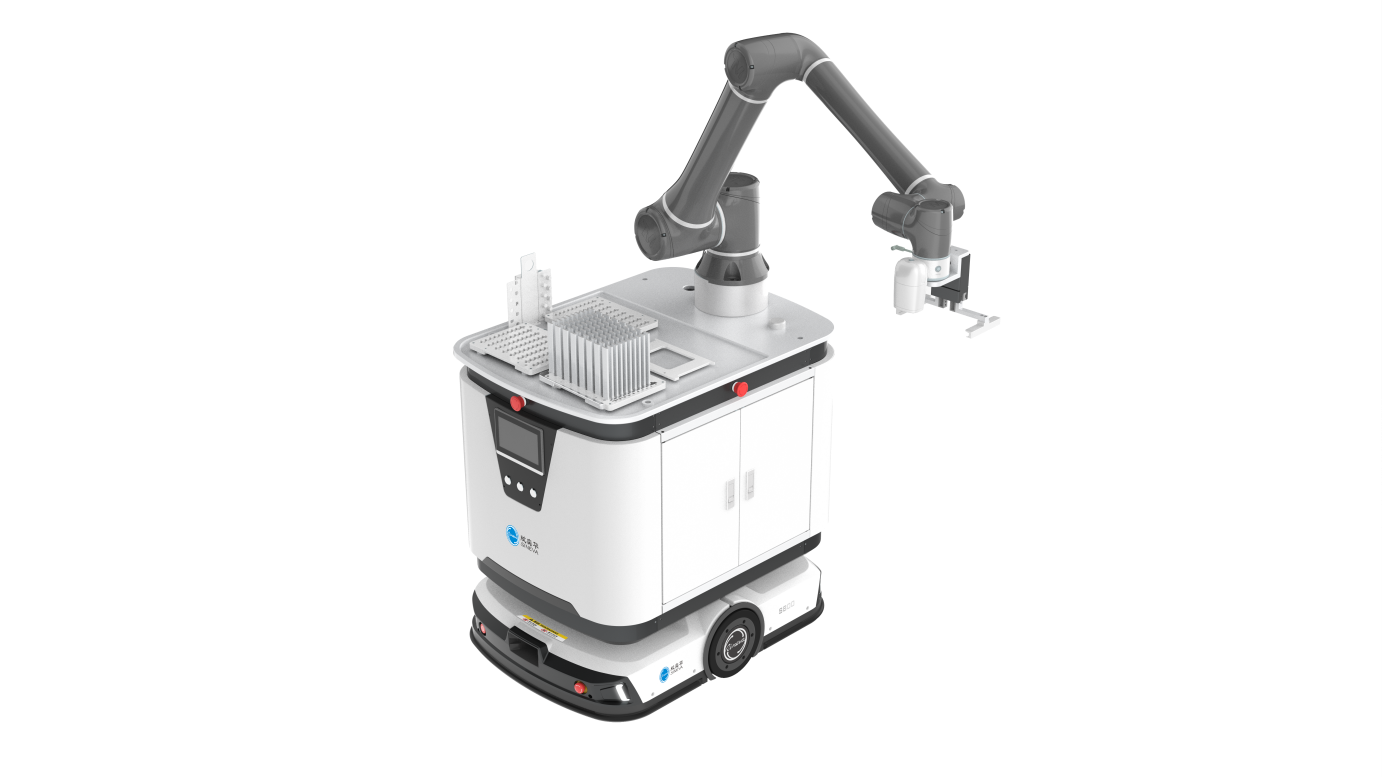
SIBOT12
产品优势:
1、机械臂灵活高效:配备高自由度机械臂,机械臂终端定位精度高,操作简单易用。
2、性能稳定:核心部件自主研发,车体与机械臂完美配合,性能更加稳定。
3、智能避障:搭载激光雷达、视觉摄像头(可选)等传感器,智能检测识别障 碍物,主动停车和避障。
| 基础参数 | 充放电性能 | 安全功能 | 运动性能 | 通过性能 | 部署环境要求 | 其他 |
|---|---|---|---|---|---|---|
| 机器人尺寸(mm):950×680×1700 | 电池类型:碳酸铁锂 | 防碰撞保护:√ | 空载速度(m/s):2.0 | 过沟能力(mm):35 | 工作 环境温度: 0~45℃ | 通讯方式:WiFi2.4G/5G |
| 自重(Kg):300 | 电池额定电压(V):48 | 声光报警:√ | 满载速度(m/s):1.5 | 过坎能力(mm):10 | 地面平整度:±4(mm/2.25mm?) | 充电形式:自动/手动 |
| 机器旋转直径(mm):1025 | 电池容量(Ah):≥65 | 急停按钮:√ | 重复停靠精度(mm):±5 | 巷道宽度(mm):900 | 地面摩擦系数:≥0.45 | 外壳颜色:黑+白色/哑光 |
| 驱动方式:双轮速轮 | 充电时间(h):≤2 | 充放电保护:√ | 停止角精度:±0.5℃ | 爬坡能力:5% | 光照强度:≤6000lx,无阳光直射 | 运行噪音:≤75(dB(A)) |
| 底盘额定负载能力(kg):800 | 充满后续航时间(h):8 | 障碍物检测:√ | 视觉识别距离(mm):800 | 防护等级:IP20 | ||
| 协作机器人负载(Kg):12 | 立体避障:√ | |||||
| 协作机器人自由度:6 | ||||||
| 协作机器人工作半径(mm):900 | ||||||
| 重复抓取精度(mm):±0.1 | ||||||
| 协作机器人关节运动范围:360° | ||||||
| 导航方式:激光SLAM+二维码+视觉导航 |


 京公网安备11030102010672号
京公网安备11030102010672号 微信
微信